基于树莓派的人工智能自动驾驶小车
# 整体流程
电机控制摄像头调试道路数据采集搭建深度学习模型,参数调试自动驾驶真实道路模拟参数最终调试使用方法:
先将树莓派小车硬件组装好使用zth_car_control.py来控制小车的前后左右移动,配合zth_collect_data.py来人工操作,使小车在自己制作的跑道进行数据采集。(该过程在树莓派进行)数据采集完成以后使用zth_process_img.py来对采集的数据进行处理,之前当前先完成一些数据清洗的工作。(电脑上执行)使用神经网络模型对数据进行训练zth_train.py,得到训练好的模型。(电脑上执行)在树莓派小车上使用zth_drive和训练好的模型,载入模型,即可实现在原先跑道的自动驾驶。(树莓派上执行)注意:只需要使用上述提到的代码即可,别的都是一些初始版本或者正在增加的一些新模块。
# 注意事项:
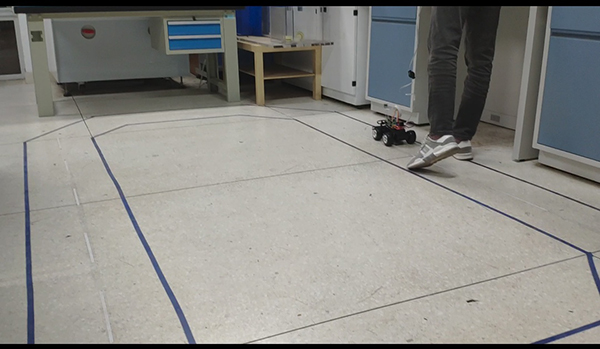
赛道需要自己制作,很重要,决定了数据质量。(我是在地板上,贴的有色胶带,然后贴成了跑道的形状)。赛道的宽度大约是车身的两倍。大约采集了五六万张图像,然后筛选出三四万张。摄像头角度问题# 具体制作流程:
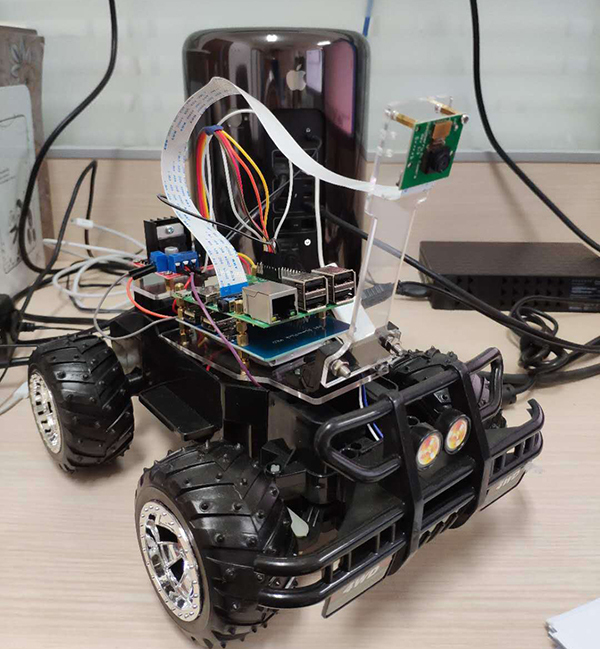
小车原始模型,某宝购买玩具车即可,比如:有电机,有自带电池盒(给电机供电)树莓派,摄像头,蓄电电池组(用于树莓派供电)使用一些螺栓,螺柱,亚克力板将树莓派,蓄电电池固定在小车上(具体方法,看手头的工具吧)组装好以后,树莓派通过VNC连接电脑,登陆树莓派,在树莓派安装keras环境,以便最后调用训练好的模型。关于小车的控制(电机控制,摄像头采集数据),都在源文件,有注释,大致思路就是通过方向键AWSD来控制方向,使用了pygame的工具包。通过电脑端的wasd方向键手动控制小车(已经VNC连接好)在制作好的赛道上进行图像采集,直线部分按w,左拐弯按a,右拐弯按d等,建议采集50000张以上。(采集的图像命名要求为,0_xxxx,1_xxxx,其中首位字母就代表了你按下的是哪个键,比如图像是0开头,那么这张图像就是直行,按下的是w键,这些0,1,2,3,4 数字就相当于数据的标签值)
7. 将图片从树莓派拷贝下来,进行数据清洗,使用电脑端的深度学习环境进行模型训练,使用的模型可以自行定义。
8. 将训练好的模型文件.h5拷贝到树莓派,然后通过树莓派调用载入模型,即可处理实时的图像,并且根据图像预测出是0,1,2,3,4等数字,也就表示了树莓派该怎么移动,通过树莓派控制电机即可。
# 正在进行一些改进:
使用迁移学习进行fine-tuning是否可以提高精度处理光照问题处理数据类别不平衡的问题
新闻排行
图文播报
科普信息网 - 科普类网站
联系邮箱:85 572 98@qq.com 备案号: 粤ICP备18023326号-39
版权所有:科普信息网 www.kepu365.cn copyright © 2018 - 2020
科普信息网版权所有 本站点信息未经允许不得复制或镜像,违者将被追究法律责任!